
Da instructables una guida passo-passo per la creazione di una mano animatronica su base Arduino e Xbee.
Dal famosissimo sito instructables arriva questa guida passo-passo realizzata dall'utente njkl44 per la creazione di una mano animatronica.
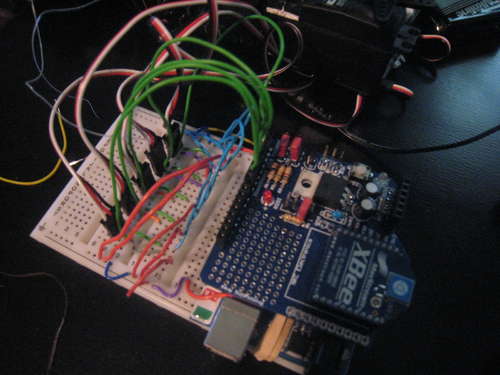
La mano animatronica prevede ovviamente due parti ovvero una parte trasmittente ed una ricevente.

In questo caso la parte trasmittente è formata da:
un guanto
arduino ATMEGA 328
Xbee shield
5 sensori di flessione
una batteria da 9V
5 resistenze da 10k
I sensori di flessione applicati su ogni dito trasducono il movimento umano in un segnale elettrico (si tratta più che altro di una variazione della resistenza elettrica del sensore).
Il segnale, ripartito tra il sensore e la resistenza fissa da 10k, viene campionato dal sistema Arduino ed inviato in modalità wireless, tramite il modulo Xbee, al sistema ricevente.
Parte ricevente:
electrical wire tubes (http://www.instructables.com/id/Simple-Animatronics-robotic-hand/)
5 servi
Xbee shield
arduino ATMEGA 328
Partendo dalla mano animatronica già realizzata, basta collegare quelli che sono "i tendini" ai 5 servi, uno per dito.

Il modulo Xbee riceve i dati dalla "mano trasmittente" e li passa al sistema arduino che provvede a guidare in modo opportuno i 5 servi.
Qui potete trovare il firmware scritto da njkl44

Fantastico progetto! Di gran lunga uno dei migliori che abbia visto.
gaetech45
Che bel progetto! ma quanto costano i 5 sensori di flessione?
Simpatico progetto,davvero molto intrigante i progetti con Arduino hanno un range di valori compreso tra 1 e + infinito 🙂
comunque,per quanto riguarda i sensori di flessione,si possono definire come dei potenziometri flessibili e sensibili al tocco? Scusate la banalità della domanda ma con quei sensori non ho mai avuto modo di lavorarci su.
http://www.ladyada.net/make/xbee/point2point.html