Guido_Ottaviani
Guido Ottaviani ([email protected]) ha lavorato con l'elettronica e come RadioAmatore per anni. Dopo aver lavorato come sviluppatore analogico e digitale per una società di comunicazione italiana per diversi anni, Guido è diventato un integratore di sistema e quindi un responsabile tecnico per una società che sviluppa e gestisce grafica, per stampa, sistemi e tecnologie di stampa per un grande editore italiano di giornali e riviste di sport. Qualche anno fa, ha rispolverato il suo campo di applicazione e il saldatore e ha iniziato a fare robot autonomi. Guido è attualmente un membro attivo di alcuni gruppi italiani di robotica, dove condivide le sue esperienze con altri che hanno la passione elettronica evangelizzando la robotica amatoriale sul web o come docente presso Let's Make.
Guido_Ottaviani Blog
In questo articolo, si spiega in dettaglio la parte hardware di un sensore audio realizzato con un componente particolare. Si può imparare a montare il componente in un circuito stampato (PCB) e configurare i moduli hardware interni per gestire un segnale …
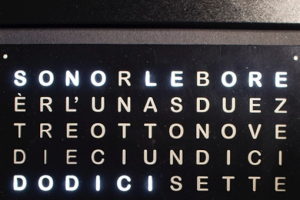
Progetto completo di un World Clock realizzato con il PIC18F4620, completamente open source. Inizialmente verrà mostrato l'hardware di un orologio che usa le parole al posto dei numeri. Successivamente si descriverà il software con le routine che possono essere utili …
Concludiamo questa serie di articoli sulla realizzazione del RinoBOT. Dopo la "Costruzione del RinoBot: scheda navigazione e controllo" e "Costruzione del RinoBot: il software", in questo articolo si descrive la scheda che, simulando i sensi umani, permette la navigazione in …
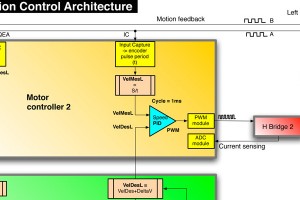
Proseguiamo il tutorial sulla realizzazione del RinoBOT, iniziata con l'articolo precedente: Costruzione del RinoBot: scheda navigazione e controllo. In questo articolo si descrive la fase di sviluppo del software per il progetto. In particolare il PID (Proportional Integral Derivative, per …
In questa serie di articoli viene presentata la realizzazione completa del RinoBOT, un robot in grado di muoversi autonomamente ed interagire con l'ambiente. In particolare in questo articolo si descrive la scheda di controllo che governa il robot azionando i …