Attualmente, vi è una certa saturazione nel mercato delle schede di controllo motore (MCB). Ci sono schede disponibili in una varietà di forme e da vari fornitori e rivenditori. Allora, che cosa ha da offrire una nuova scheda motor controller, o anche due? Per rispondere a questa domanda, analizziamo un paio di nuovi MCB Gareth su 4tronix con sede a Derby. La soluzione di Gareth alla saturazione del mercato è quella di costruire schede che siano molto semplicemente efficienti.
RoboHAT
Il primo è il RoboHAT. Si tratta di una scheda HAT preassemblata con le seguenti caratteristiche:
- Un regolatore switching a 5V che permette alla scheda di essere alimentata, e che permette di alimentare la Pi da una sorgente di 7-10V.
- Un chip dual H-bridge per guidare due motori DC (o due coppie).
- Sei ingressi GPIO a livelli sfalzati con connettori a 3 pin.
- Quattro uscite GPIO shiftate di livello a 5V con connettori a 3 pin (in grado di pilotare servomotori).
- Connettore a 4-pin per un sensore di distanza ad ultrasuoni.
- Connettore breakout I2C.
- Viti e distanziali di montaggio per fissare la HAT per il Raspberry Pi.
Ci sono parecchie funzioni, parecchi motori, soprattutto se si utilizzano tutte le uscite per servomotori (Figura 1).
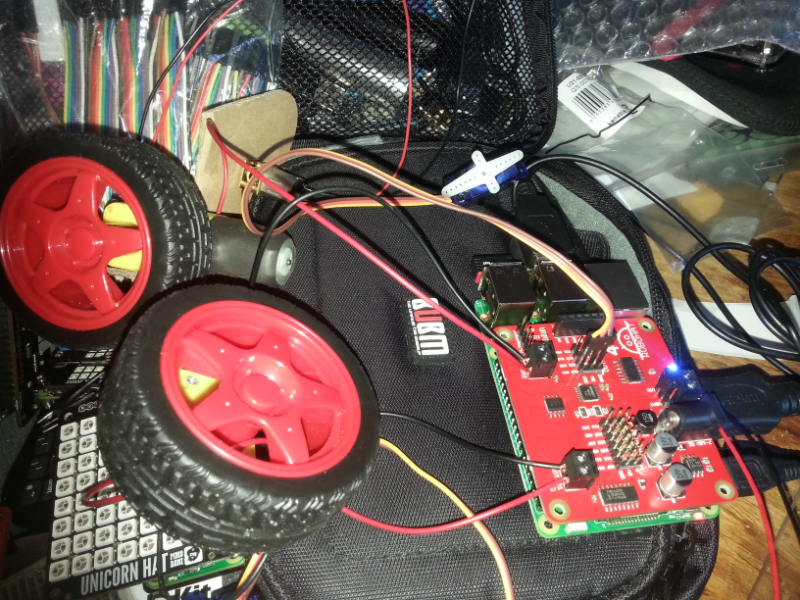
Figura 1: RobotHAT in funzione
Per installare l'HAT basta inserirlo nell'apposito header. Ha una EEPROM che fa avviare sia le configurazioni necessarie sia il bus I2C. Le istruzioni sono semplici, è possibile scaricare uno script di installazione per essere facilmente eseguito. Inclusi nel download ci sono una libreria Python e diversi script di test.
Attraverso questi script di test si può provare il dispositivo HAT, collegando un pacco di batterie AA da 4, due motori DC e due servomotori. Molto semplice, molto ben caratterizzato e, per circa 40 euro (IVA inc), di buona qualità. E' possibile acquistarlo dal sito di 4tronix.
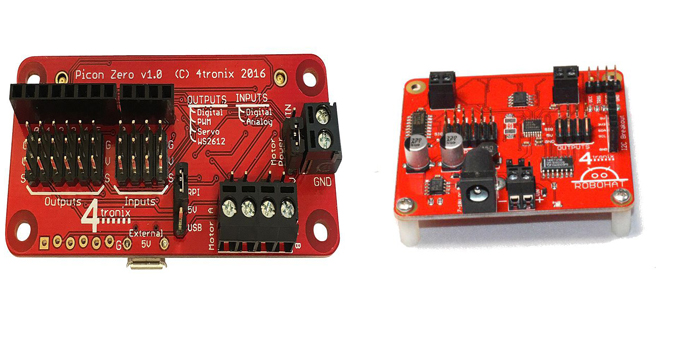
Picon Zero
Picon Zero è una scheda Zero-form-factor. È pre-assemblata e presenta le seguenti caratteristiche:
- Due driver motori H-bridge in grado di erogare fino a 1,5 A per canale (2A max) in avanti e in retromarcia.
- Sei canali di uscita a 3-pin general purpose 5 V che possono essere impostati come digital, PWM, servomotori o WS2812 (aka neopixels).
- Quattro input general purpose a 3 pin 5V che possono essere impostati come digital, analog o DS18B20 (sensore di temperatura digitale).
- Pin GPIO extra.
- Un connettore header per I2C.
- I motori possono essere alimentati sia da una fonte di alimentazione 5V del Pi sia da un pacco di batterie esterne.
Il Picon Zero (Figura 2) è in realtà una scheda superiore rispetto al RoboHAT. Sì, c'è un po' più di configurazione manuale da fare (sotto forma di un' installazione manuale apt-get delle librerie I2C) e sì, è più piccola e ha meno opzioni di alimentazione. E no, non alimenta il Pi dal pacco batterie.
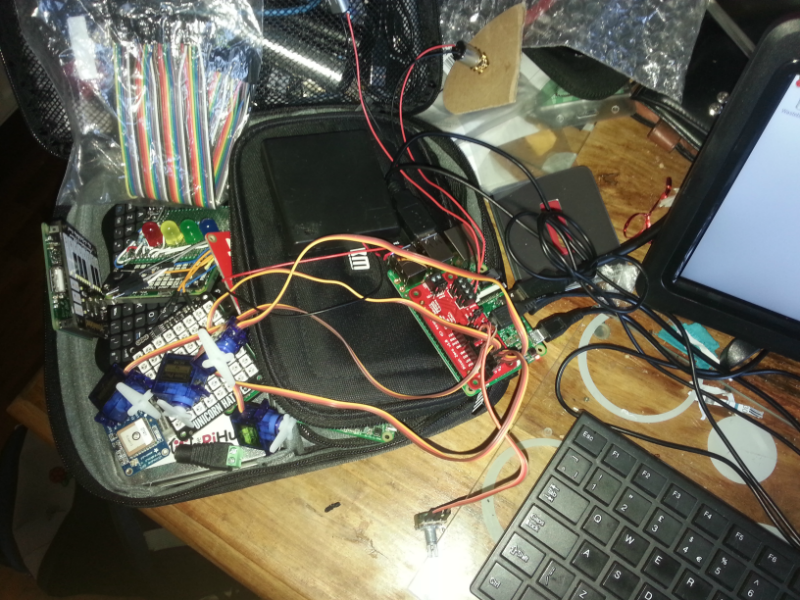
Figura 2: Picon Zero in funzione
Tuttavia, ha più canali di uscita (e quindi può essere utilizzata per controllare più servomotori) e ha ingressi analogici. L'opzione per impostare le uscite digitali, PWM, servo o WS2812 è eccezionale e la capacità di alimentare i motori semplicemente da una fonte di alimentazione a 5V del Pi fornisce molta flessibilità nell'usarlo senza far pasticci con un pacco batteria se i motori sono a bassa potenza.
Come test sono stati utilizzati due motori a corrente continua con micro ingranaggi in metallo e quattro servomotori (!), il tutto collegato alla scheda e alimentato dalla linea 5V del Pi senza problemi.
Come il RoboHAT, il Picon Zero ha uno script di installazione che scarica una libreria e diversi script di esempio. L'utilizzo di questi script permette di far funzionare i motori al minimo sforzo.
Il prezzo è di circa 25 euro (iva inclusa), il che è molto ragionevole, e se ne può acquistare uno dal sito 4tronix o PiHut.
Conclusioni
Queste due schede di 4tronix sono eccellenti. Certo, sono un po' più costose rispetto ad alcune (non tutte), ma il numero di caratteristiche e la bellezza tecnica della loro progettazione valgono il costo. Onestamente, se si è alla ricerca di una scheda di controllo motore per controllare carichi motori, queste due schede fanno al caso vostro.
Link
Articolo originale: http://www.recantha.co.uk/blog/?p=14715



Con queste soluzioni sarà possibile anche costruire il proprio robot con la Raspberry, le schede ovviamente serviranno per comandare i motori che faranno muovere il robot. Le librerie inoltre permettono di programmare facilmente la scheda utilizzando anche gli script di test.